










 English
English русский
русский 日本語
日本語 Español
Español Deutsch
Deutsch 中文简体
中文简体


製品相談
メールアドレスは公開されません。必要なフィールドにマークが付けられています *

コンテンツ
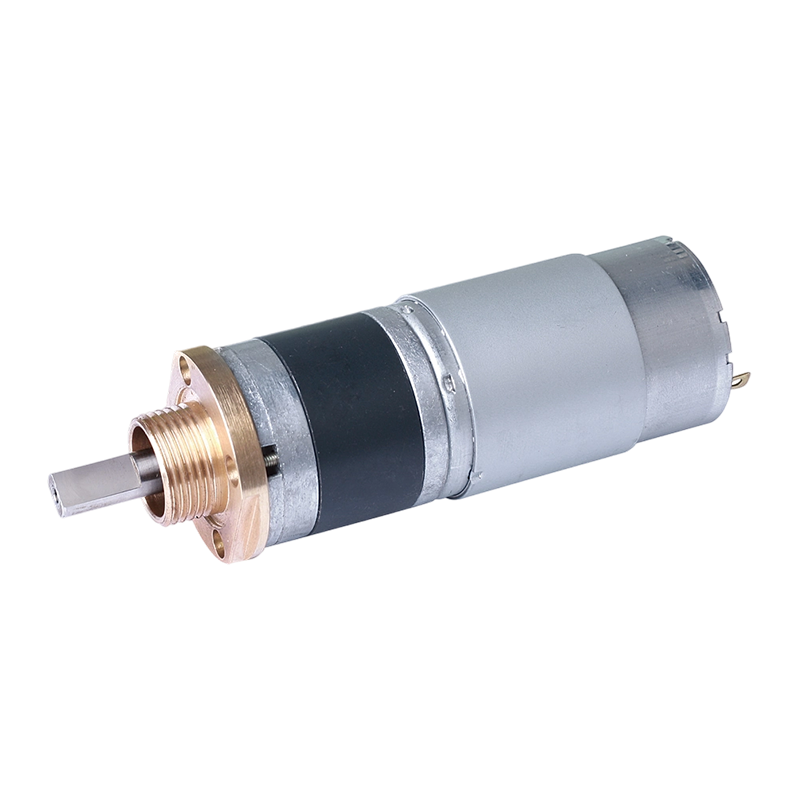
DC ギア モーターは、単一の統合ユニット内に機械式ギアボックスと組み合わせられた直流電気モーターです。モーター自体は高速で回転します (多くの場合、定格電圧で 3,000 ~ 15,000 RPM)。しかし、実際のアプリケーションのほとんどでは、大きな回転力を伴うゆっくりとした制御された動作が必要です。ギアボックスは、一連の噛み合うギアを介して速度とトルクを交換することでこの問題を解決します。その結果、出力シャフトはモーターのローターよりもはるかにゆっくりと回転しますが、それに比例してシャフトで得られるトルクは大きくなります。
ギアボックスがなければ、小型 DC モーターはファン ブレードを簡単に回転させることができますが、荷物を持ち上げたり、コンベア ベルトを駆動したり、バルブを回したりするのは困難です。たとえば 100:1 の減速比では、5 mN・m の自走トルクを生成する同じモーターが、出力で約 500 mN・m を供給します。これから、ギアの噛み合い摩擦による損失 (ギアのタイプと潤滑に応じて通常 5 ~ 20%) を差し引いた値になります。このトルクの増大と、モーターとギアボックスの 1 つのアセンブリへのコンパクトな統合が、DC ギヤード モーターが産業用、商業用、民生用アプリケーションで最も広く指定されているモーション コンポーネントの 1 つである理由です。
ギアボックスの設計は、他のほぼすべての設計変数よりも性能、サイズ、効率、騒音に大きな影響を与えます。 4 つの構成が市場を支配しています。
平歯車は、シャフト軸に平行にまっすぐな歯が切られています。平歯車 DC モータは、最も単純で製造コストが低い歯車タイプであるため、コスト重視の用途ではデフォルトの選択肢となります。平歯車の主な弱点は騒音です。平歯車は噛み合いごとに歯幅全体が同時に噛み合うため、高速時に特有のカタカタ音が発生します。効率は良好で (通常、1 段あたり 95 ~ 98%)、中程度のラジアル荷重を適切に処理します。平歯車モーターは、静かな動作が優先されないプリンター、玩具、自動販売機、軽量アクチュエーターで一般的です。
遊星ギアボックスは、中央の「太陽」ギアの周囲に複数の「遊星」ギアを配置し、すべてリングギア内に含まれています。負荷は複数の遊星歯車で同時に共有されるため、遊星 DC 歯車モーターは、コンパクトな同軸パッケージで非常に高いトルク密度を実現します。出力シャフトはモーターシャフトと位置合わせされているため、スペースに制約のあるレイアウトでも設置が簡単になります。遊星ギアボックスは、平歯車やウォーム タイプよりも剛性が高く、精度が高いため、ロボット工学、無人搬送車 (AGV)、電動ドライバー、および高トルク、厳密な位置精度、長寿命が要求される用途に最適です。トレードオフはコストです。遊星ギアボックスは、同じ定格トルクのスパーまたはヘリカル タイプよりも製造コストが大幅に高くなります。
ウォームギアボックスは、90度の角度でウォームホイールと噛み合うネジ状のウォームシャフトを使用します。この構成は、単一ステージで非常に高い減速比 (通常は 5:1 ~ 100:1) を達成し、自然なセルフロック特性を提供します。つまり、モーターが停止すると、負荷がギアボックスを逆駆動することができなくなります。このため、ウォーム ギア DC モーターは、ガレージ ドア オープナー、ステージ リフト、病院のベッド アクチュエーター、セキュリティ バリアなど、電力を使わずに負荷の位置を保持する必要がある用途に最適です。主な制限は効率です。ウォーム ギアの噛み合い摩擦は高く、一般的な単段効率は進角に応じて 50 ~ 90% の範囲であり、比率が高くなると徐々に効率が低下します。ウォーム ギア モーターは、継続的な高負荷デューティ サイクル下でもかなりの熱を発生します。
はすば歯車の歯はシャフト軸に対して斜めにカットされているため、歯間の接触は急激ではなく徐々に進行します。これにより、平歯車に比べて騒音と振動が大幅に低減され、有効接触面積が大きくなるため負荷容量がわずかに向上します。ヘリカル DC ギア モーターは、コンベア ドライブ、包装機械、医療機器など、より静かな動作が必要なアプリケーションで一般的です。ヘリカルベベルの組み合わせにより、出力シャフトをモーターに対して 90 度オフセットすることができ、ウォームドライブと同様ですが、より高い効率 (通常、1 段あたり 94 ~ 97%) が得られます。はすば歯車の噛み合わせによって生成される軸方向の推力が増加するため、この負荷に対応できるベアリングが必要となり、ユニットコストがわずかに増加します。
DC モーター要素自体には 2 つの基本的なアーキテクチャがあり、どちらを選択するかがコスト、メンテナンス要件、速度範囲、耐用年数に大きく影響します。
| 特徴 | ブラシ付きDCギアモーター | ブラシレス DC ギアモーター (BLDC) |
| 転流方式 | 機械式(カーボンブラシ整流子) | 電子式 (ESC またはモータードライバー) |
| 標準的な耐用年数 | 500 ~ 3,000 時間 (ブラシの摩耗は限定的) | 10,000~20,000時間 |
| 制御の複雑さ | シンプル - 電圧または PWM ダイレクト | 専用のBLDCドライバー/ESCが必要です |
| 効率 | 典型的な 75 ~ 85% | 通常 85 ~ 95% |
| ノイズとEMI | 高い(ブラシのアーク放電により EMI が発生) | 下位 |
| 単価 | 下位 | 上位(モータードライバー) |
| 代表的な用途 | おもちゃ、家電製品、ライトオートメーション | ロボティクス、AGV、医療機器、EV |
プロトタイピングや低負荷の断続的なアプリケーションの場合、シンプルな L298N または TB6612FNG H ブリッジで駆動されるブラシ付き DC ギア モーターが、システムを動作させるための最も速くて安価なルートです。継続的に稼働するもの、過酷な環境で動作するもの、またはメンテナンスなしで現場で何年も使用しなければならないものでは、ブラシレス DC ギア モーターは、初期費用が高く、ドライバー電子機器が追加されているにもかかわらず、ほとんどの場合、総所有コストが向上します。
DC ギア モーターのデータシートは膨大になる場合がありますが、モーターがアプリケーションで動作するかどうかは 5 つのパラメーターによって決まります。それぞれを理解することで、よくある選択の間違いを防ぐことができます。
DCギアモーター これらは特定の電源電圧向けに設計されており、産業用および趣味用アプリケーションでは最も一般的には 6V、12V、24V、または 48V です。定格電圧を大幅に超えてモーターを動作させると、ブラシ付きタイプのブラシの摩耗が加速し、巻線が過熱し、ベアリングの寿命が短くなります。定格電圧未満で動作すると、利用可能なトルクが減少し、負荷がかかるとモーターが停止する可能性があります。バッテリ駆動システムの場合、充電サイクルの先頭での過電圧を避けるために、フル充電時ではなく充電途中でモータの定格電圧をバッテリ パックの公称電圧に一致させます。新しく充電した 3S LiPo (12.6V) から動作する 12V DC ギア モーターは、かろうじて許容可能です。 4S パック (16.8V) から実行すると、すぐに壊れてしまいます。
無負荷速度は、モーターが定格電圧でトルクゼロで動作しているときの出力シャフトの RPM です。実際の負荷がかかると、速度は通常、定格 (連続) トルクで 10 ~ 20%、ピーク ストール トルクで最大 50% 低下します。 DC ギヤード モーターが必要な速度で負荷を移動できるかどうかを計算する場合は、無負荷時の数値ではなく、予想されるトルク動作点での負荷速度を常に使用してください。メーカーは無負荷速度と失速トルクのみを記載している場合があります。負荷がかかった動作点は、速度とトルクの曲線のほぼ中央に位置します。
定格トルク (連続トルクとも呼ばれます) は、モーターが過熱することなく無期限に供給できる最大トルクです。ストール トルクは、シャフトが静止したときに生成されるピーク トルクであり、通常はブラシ付き DC ギア モーターの定格トルクの 5 ~ 10 倍です。ストール トルクは、断続的なピーク負荷 (たとえば、固着したバルブを解放するのに必要な力) を見積もるのに役立ちますが、ストールまたはストールに近い状態で継続的に動作すると、モーターが急速に過熱します。定格トルクがアプリケーションの予想連続負荷トルクより少なくとも 20 ~ 30% 高いモーターを選択してください。この安全マージンは、摩擦変動、電圧低下、温度ディレーティングを考慮しています。
ギア比は、モーター軸の回転数が出力軸の 1 回転を生み出すことを表します。比率 50:1 は、モーターの 50 回転ごとに出力が 1 回回転することを意味します。ギア比が高くなると、出力速度が低くなり、出力トルクが高くなります。ただし、レシオが非常に高いとギア段数が多くなり、摩擦損失とバックラッシュ、つまり方向が反転したときの出力シャフトのわずかな遊びが増加します。位置決めアプリケーションの場合、バックラッシュは重要な仕様です。遊星ギアボックスのバックラッシュは通常、高精度グレードで 0.5 ~ 3 分角ですが、エコノミー平歯車ボックスのバックラッシュは 1 ~ 5 度である場合があり、これは再現性のある位置決めを必要とするものには許容できません。
デューティ サイクルは、特定のサイクル期間内でモーターが動作する時間と休止する時間の割合を表します。 S1 (連続使用) 定格のモーターは、過熱することなく定格負荷で無期限に動作できます。 S2 (短時間デューティ) および S3 (断続的周期デューティ) 定格では、オフ期間中にモーターが冷却されるため、より高いピーク電力レベルが可能になります。モーターの定格デューティを実際の動作サイクルに常に一致させてください。たとえトルクと速度が銘板の制限内であっても、デューティ サイクルが 30% と定格されているモーターは、継続的に動作すると過熱して故障します。
多くの場合、電圧の選択はモーターの好みではなく、利用可能な電源によって決まりますが、各電圧層の一般的な使用例を理解すると、選択肢をすぐに絞り込むことができます。
最初からモーターを正しく選択することで、コストのかかる再設計や現場での故障を回避できます。次の実践的なフレームワークに従ってください。
アプリケーションが出力シャフトに必要とするトルクを計算します。車輪付きロボットの場合、これはロボットの質量を加速し、転がり摩擦を克服し、動作中に予想される傾斜を登るのに必要な力を計算することを意味します。リニア アクチュエータの場合、親ネジにかかる力を計算し、ネジのリードと効率を介してモータ トルクに変換します。摩擦の変動、経年劣化、最悪の荷重シナリオを考慮して、25 ~ 50% の安全マージンを追加します。この目標トルク数値にマージンを適用したものが、最小定格トルク仕様となります。
アプリケーションが必要とする最小および最大の出力シャフト速度を確立します。直径 50 mm の駆動ローラーを使用して製品を 0.5 m/s で移動するコンベアには、約 191 RPM (0.5 / (π × 0.05) × 60) の出力速度が必要です。通常の状態でモーターが失速近くで動作しないように、無負荷速度が必要な負荷速度より少なくとも 15 ~ 20% 高いモーターを選択してください。
ギアボックスのタイプをアプリケーションの要件に合わせるには、次の決定ガイドを使用してください。
電源がストール時にモーターのピーク電流需要を供給できることを確認してください。ブラシ付き DC ギア モーターのストール電流は、通常、無負荷電流の 5 ~ 10 倍です。電源が起動中またはジャム状態中に一時的にこの電流を供給できない場合は、調整可能な電流制限を備えた電流制限モーター ドライバーを追加するか、適切なヘッドルームを持つモーター ドライバーを選択してください。ブラシレス DC ギア モーターの場合、BLDC ドライバーの連続電流定格とピーク電流定格がモーターの要件を少なくとも 20% のマージンで超えていることを確認してください。
標準の DC ギアモーターは密閉されていません。モーターが塵、湿気、冷却剤の飛沫、または洗浄条件にさらされる場合は、IP 定格のユニットを指定してください。防塵および飛沫保護には IP54、より要求の厳しい環境には IP65 または IP67 が必要です。食品加工、製薬、または海洋用途の場合は、ギアボックス潤滑剤が該当する規制要件を満たしていることを確認してください (食品接触ゾーン用の NSF H1 食品グレード グリースなど)。動作温度範囲も重要です。標準モーターの定格は周囲温度 0 ~ 40°C です。冷蔵倉庫または北部気候の屋外設置の場合は、低温グリースの仕様と巻線温度定格を確認してください。
DC ギヤード モーターは、非常に幅広い製品やシステムに使用されています。それらが一般的に使用される場所を理解することは、適切なリファレンス設計と検証済みの構成を特定するのに役立ちます。
| 産業 | アプリケーション | 一般的なギアモーターのタイプ |
| ロボティクスとAGV | 駆動輪、関節作動、グリッパー機構 | ブラシレスプラネタリー、24V ~ 48V |
| 産業オートメーション | コンベヤ、インデックステーブル、バルブアクチュエータ | ヘリカル、ワーム、またはプラネタリー、24V |
| 医療機器 | 輸液ポンプ、手術器具、病院用ベッド | ブラシレスプラネタリー、低バックラッシュ、12V ~ 24V |
| 自動車 | パワーウィンドウ、シートアジャスター、サンルーフドライブ | ブラシ付きワームまたはスパー、12V |
| 家庭用電化製品 | カメラのパン/チルト、スマート ホーム アクチュエーター、プリンター | ブラシ付きスパー、5V ~ 12V |
| 農業 | 灌水バルブ制御、播種機構 | IP定格のワームまたはプラネタリー、12V~24V |
| ビルディングオートメーション | HVAC ダンパー、ブラインド アクチュエーター、ドア ドライブ | ブラシレス ヘリカルまたはウォーム、24V |
DC モーターの速度は印加電圧に直接比例するため、DC ギアモーターは可変速動作に適しています。実際には、速度は 3 つの方法のいずれかで制御されます。
PWM は、マイクロコントローラー、PLC、モーター ドライバー IC からブラシ付き DC ギア モーターを制御するための標準的な方法です。ドライバーは固定周波数 (通常は 1 ~ 20 kHz) でモーター電源のオンとオフを切り替え、デューティ サイクル (電源がオンになっている時間の割合) によって平均電圧が決まり、したがって速度が決まります。 12V での 50% デューティ サイクルは、モーターに約 6V に相当する電圧を供給します。 PWM 制御は、スイッチング トランジスタがほとんどの時間を完全オンまたは完全オフに費やし、抵抗損失を最小限に抑えるため、効率的です。 1 kHz 未満の PWM 周波数では、電機子巻線がスイッチング周波数で振動するため、モーターの鳴き声が聞こえることがあります。 20 kHz を超える周波数では、これが可聴範囲を超えます。ブラシ付き DC ギア モーターの場合、10 ~ 20 kHz の PWM 周波数が一般的な実用的な選択です。
ロボット プラットフォーム、テープ ドライブ、精密ディスペンスなど、負荷の変動に関係なく正確で一定の速度が必要なアプリケーションの場合、モーター シャフトまたはギアボックスの出力に取り付けられたロータリー エンコーダーが、PID コントローラーにリアルタイムの速度フィードバックを提供します。コントローラーは実際の速度を設定値と比較し、PWM デューティ サイクルを調整して補償します。 DC ギア モーター用のエンコーダは通常、直角位相光学式または磁気ホール効果タイプで、精度要件に応じて 1 回転あたり 6 ~ 数千カウントの分解能を備えています。多くの DC ギア モーター サプライヤーは、統合エンコーダ オプションを標準カタログ品目として提供しており、ハードウェアの統合が大幅に簡素化されています。
負荷が比較的一定で速度精度が重要ではない単純なシステムでは、可変 DC 電源またはリニア電圧レギュレータを使用して供給電圧を調整することで速度を設定できます。このアプローチは最も効率が低く、リニア レギュレータは電圧降下を熱として放散し、負荷補償はありませんが、最も単純な実装であり、レギュレータの熱放散が問題にならないテスト ベンチ、手動速度調整、および非常に低電力のアプリケーションに適しています。
DC ギア モーターが最終的に故障する原因を理解することは、サービス間隔を延長し、計画外のダウンタイムが発生する前に問題を検出するシステムを設計するのに役立ちます。
メールアドレスは公開されません。必要なフィールドにマークが付けられています *
このフォームを使用して私に連絡できます。
著作権 © 浙江東政電機有限公司 
